Yuxiang Cui
Graduate Student | Robotics Lab | Department of Control Science and Engineering | Zhejiang University

Hangzhou, Zhejiang, China
Research Interests:
- Multi-robot Navigation
- Reinforcement Learning / Multi-agent Reinforcement Learning
Please visit my own Bilibili Channel for videos.
Please visit our Lab’s YouTube Channel and Bilibili Channel for more information.
news
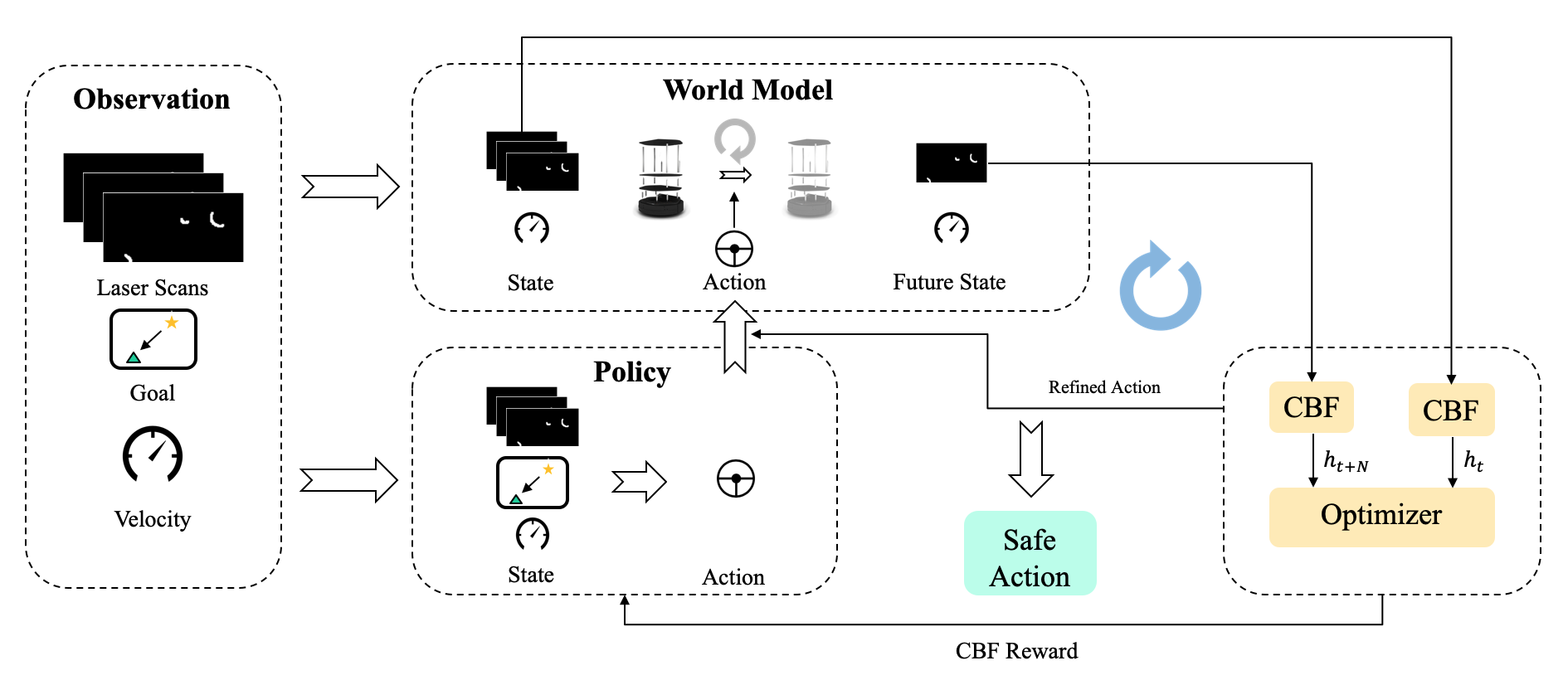
| Sep 15, 2021 | One new paper submitted in ICRA 2022: “Learning Observation-Based Certifiable Safe Policy for Decentralized Multi-Robot Navigation”. |
|---|---|
| Apr 30, 2021 | One RCAR 2021 paper accepted: “Socially-Aware Multi-Agent Following with 2D Laser Scans via Deep Reinforcement Learning and Potential Field”. |
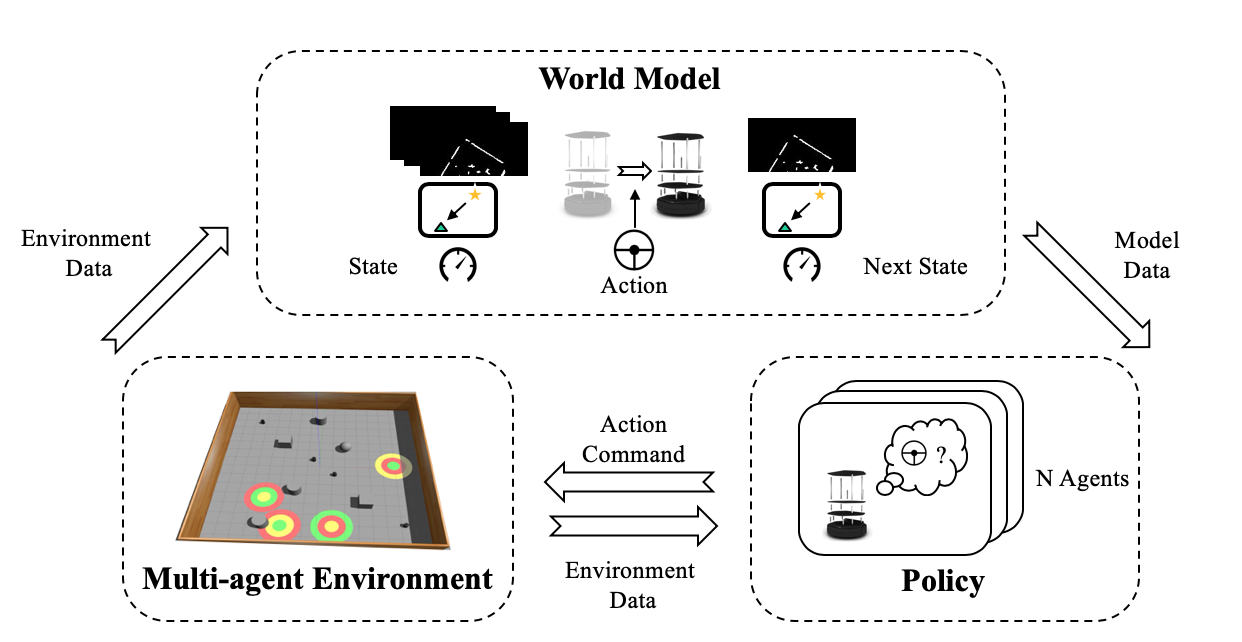
| Mar 1, 2021 | One ICRA 2021 paper accepted: “Learning World Transition Model for Socially Aware Robot Navigation”. |
selected publications

- Human-Robot Motion Retargeting via Neural Latent OptimizationarXiv preprint arXiv:2103.08882 2021